So, I was trying to hang this ridiculously heavy mirror the other day, right? My friend, bless his enthusiastic but slightly clueless heart, insisted we could just eyeball it. "Gravity will guide us!" he declared, brandishing a tape measure like a conductor’s baton. Needless to say, our initial attempt resulted in a mirror that was… let’s just say, artistically tilted. It leaned more than a drunk at last call. And I, staring at this crooked masterpiece, had this sudden, irrational urge to invent a new physics law involving mirrors and defiance.
It got me thinking, though. In the world of vectors, which are basically fancy arrows with direction and length, you can't just "eyeball" perpendicularity. You need a more precise method, especially when you're dealing with not just one, but two directions at once. You see, that mirror wasn't just leaning in one direction; it was leaning forward and sideways, a delightful combination of no-nos. And trying to find a way to make it perfectly straight, perfectly balanced… well, that’s where our little vector adventure begins.
This whole "finding a vector orthogonal to two others" thing sounds super intimidating, right? Like something out of a quantum physics textbook your professor probably wrote. But stick with me! It’s actually pretty cool, and once you get the hang of it, it’s surprisingly useful. Think of it as a superpower for your math brain, allowing you to find that perfect, perpendicular direction in 3D space.
Before we dive headfirst into the deep end of cross products (don't worry, we'll ease you in!), let’s talk about what "orthogonal" actually means. In simple terms, it just means perpendicular. At a perfect 90-degree angle. Like the corner of a room, or the way a wall meets the floor. In the world of vectors, if two vectors are orthogonal, their dot product is zero. Remember dot products? The ones where you multiply corresponding components and add them up? Yeah, those guys.
Now, finding a vector orthogonal to one other vector is relatively easy. There are infinitely many! Imagine a line in 3D space. You can draw circles around it, and any vector pointing from the line to a point on one of those circles would be orthogonal to the original vector. It's like a really, really wide cone of possibilities.
But finding a vector orthogonal to two other vectors? That’s a much tighter constraint. Think of our mirror again. It was leaning because it wasn't perpendicular to the wall (let's call that vector U) and it wasn't perpendicular to the floor (let's call that vector V). We needed a direction that was at a 90-degree angle to both of those. That’s a much more specific requirement, like finding a needle in a haystack… if the haystack was infinitely large and you only had a tiny magnet.
The Cross Product: Our Magical Tool
Enter the cross product. This is the superhero we've been waiting for. The cross product of two vectors, let's say U and V, produces a new vector that is, by definition, orthogonal to both U and V. Mind. Blown. It's like a built-in perpendicularity finder.
So, how does this magical operation work? It’s not as scary as it sounds, I promise. If you’re working in 3D space (which is usually where this comes up), and your vectors U and V have components like:
U = <Ux, Uy, Uz>
V = <Vx, Vy, Vz>
Then their cross product, written as U x V, is calculated like this:
U x V = <(UyVz - UzVy), (UzVx - UxVz), (UxVy - UyVx)>
See that? It’s a formula. A formula that gives you a vector. And that vector, my friends, is guaranteed to be orthogonal to both U and V.
Now, I know what you might be thinking. "That looks like a lot of letters and minus signs. Can I just… not?" And to that I say, you could, but then you’d be stuck trying to eyeball perpendicularity in 3D, which, as my mirror saga proved, is a recipe for disaster. Plus, this formula is actually your friend! It’s a shortcut, a cheat code.
Let's break down those components.
The first component is (UyVz - UzVy). You can think of it as "take the Y of the first and multiply by the Z of the second, then subtract the Z of the first multiplied by the Y of the second."
The second component is (UzVx - UxVz). Same logic: "Z of first times X of second, minus X of first times Z of second." Notice the cyclic pattern here? Y, Z, X, Y, Z, X… It’s almost like a little dance.
And the third component is (UxVy - UyVx). You guessed it: "X of first times Y of second, minus Y of first times X of second."
It’s important to note that the order matters! U x V is NOT the same as V x U. In fact, V x U = -(U x V). It points in the opposite direction. This is called the anti-commutative property, and it’s a big deal. So, if you want your orthogonal vector pointing one way, you cross U by V. If you want it pointing the other, you cross V by U.
A Little Determinant Trick (Because Who Doesn't Love Determinants?)
Now, remembering that formula can be a pain. Like trying to remember all the characters in that one show everyone’s obsessed with. But there’s a neat trick using determinants. If you’ve encountered determinants before, you’ll find this a lifesaver. If not, just think of this as another cool math pattern.
You can set up a sort of symbolic determinant like this:
| i j k | |---|---|---| | Ux | Uy | Uz | | Vx | Vy | Vz |
Where i, j, and k are the standard unit vectors in the x, y, and z directions respectively (you know, <1, 0, 0>, <0, 1, 0>, and <0, 0, 1>).
When you "expand" this determinant (using the rules of 3x3 determinants), you get:
i(UyVz - UzVy) - j(UxVz - UzVx) + k(UxVy - UyVx)
Which, if you rearrange the middle term to match the standard formula (-j(A-B) = j(B-A)), becomes:
i(UyVz - UzVy) + j(UzVx - UxVz) + k(UxVy - UyVx)
And BAM! You get the same components as before, just expressed in terms of i, j, and k. This determinant method is often easier to remember because it follows a predictable pattern. It’s like a secret handshake for vector wizards.
But Wait, There's More! We Need a Unit Vector!
Okay, so we’ve found a vector that’s orthogonal to both U and V. That’s a big win! But the question asks for a unit vector. Remember what a unit vector is? It's a vector with a magnitude (or length) of exactly 1. It just points in a direction.
Our cross product U x V has a magnitude, and it’s probably not 1. Unless we get super lucky. So, to turn our orthogonal vector into a unit vector, we need to normalize it.
How do we do that? Simple! We divide the vector by its magnitude.
First, find the magnitude of our orthogonal vector, let's call it W = U x V = <Wx, Wy, Wz>. The magnitude, denoted as ||W||, is calculated using the Pythagorean theorem in 3D:
||W|| = sqrt(Wx2 + Wy2 + Wz2)
Once you have that magnitude, the unit vector, which we can call û (the little hat means "unit vector"), is simply:
û = W / ||W|| = <Wx / ||W||, Wy / ||W||, Wz / ||W||>
And there you have it! A unit vector that is orthogonal to both U and V. You’ve essentially found that perfectly straight line, that perfect perpendicular direction that doesn’t exist in the tilted reality of my poorly hung mirror.
Let's Try an Example! (Because Math is More Fun with Numbers)
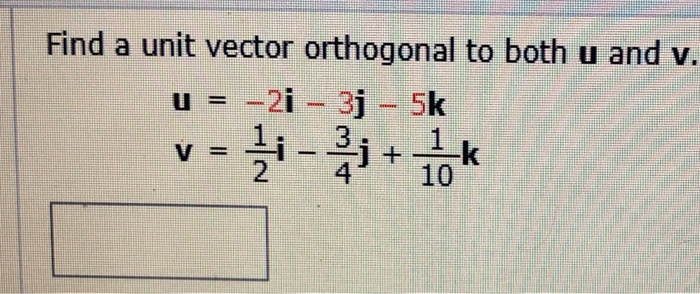
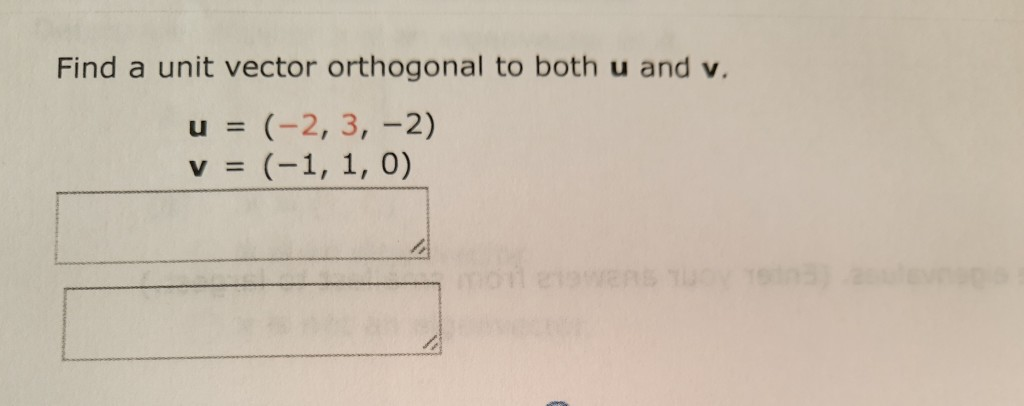
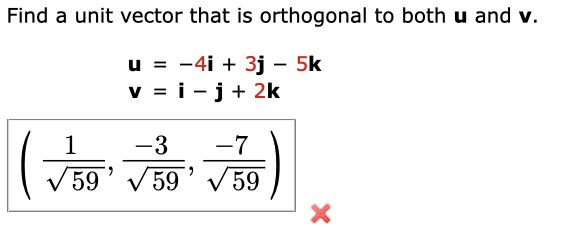
Alright, enough theory! Let’s get our hands dirty with some numbers. Suppose we have two vectors:
U = <1, 2, 3>
V = <4, 5, 6>
We want to find a unit vector orthogonal to both.
Step 1: Calculate the cross product U x V.
Using the formula:
U x V = <(UyVz - UzVy), (UzVx - UxVz), (UxVy - UyVx)>
Let's plug in the numbers:
Ux=1, Uy=2, Uz=3
Vx=4, Vy=5, Vz=6
1st component: (2 * 6) - (3 * 5) = 12 - 15 = -3
2nd component: (3 * 4) - (1 * 6) = 12 - 6 = 6
3rd component: (1 * 5) - (2 * 4) = 5 - 8 = -3
So, W = U x V = <-3, 6, -3>. Phew! That wasn't so bad, was it?
Step 2: Calculate the magnitude of W.
||W|| = sqrt((-3)2 + 62 + (-3)2)
||W|| = sqrt(9 + 36 + 9)
||W|| = sqrt(54)
We can simplify sqrt(54) if we want, as 54 = 9 * 6, so sqrt(54) = 3 * sqrt(6). It’s not strictly necessary for the next step, but it’s good practice!
Step 3: Normalize W to get the unit vector.
û = W / ||W|| = <-3 / sqrt(54), 6 / sqrt(54), -3 / sqrt(54)>
Or, using the simplified magnitude:
û = <-3 / (3sqrt(6)), 6 / (3sqrt(6)), -3 / (3sqrt(6))>
Now we can simplify these fractions:
û = <-1 / sqrt(6), 2 / sqrt(6), -1 / sqrt(6)>
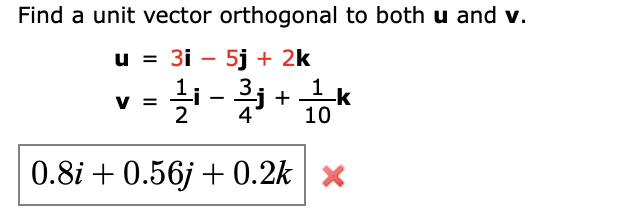
And there you have it! A unit vector that is orthogonal to both <1, 2, 3> and <4, 5, 6>. You could check this by calculating the dot product of û with U and û with V. If both dot products are zero, you’re golden! (Go on, try it, I’ll wait… See? Zero!)
Why Bother? (Besides Impressing Your Friends with Vector Superpowers)
So, why would you ever need to do this? Well, this concept is fundamental in so many areas of math, physics, and engineering.
* Finding the Normal Vector to a Plane: If you have two vectors lying in a plane, their cross product gives you a vector that is perpendicular to the *entire plane. This is super important for things like calculating surface area, understanding light reflection, or defining the orientation of a surface. Think of the wall my mirror was supposed to be on – its normal vector would be orthogonal to any vector lying flat on the wall.
* Computer Graphics: When rendering 3D scenes, calculating the orientation of surfaces (their normals) is crucial for lighting and shading. The cross product is used extensively to figure out which way a polygon is facing.
* Physics: In electromagnetism, the direction of the force on a charged particle moving in a magnetic field is given by the cross product of the particle's velocity and the magnetic field vector. That's the Lorentz force! Also, torque, which is the rotational equivalent of force, involves a cross product.
* Geometry: Defining coordinate systems, rotations, and transformations often relies on finding orthogonal vectors.
Basically, anytime you need to define a direction that’s "out of" a plane or "at a right angle to" two existing directions, the cross product is your go-to tool.
So, next time you’re faced with a situation requiring perfect perpendicularity in 3D, don’t just eyeball it. Whip out your trusty cross product, normalize your result, and bask in the glory of your precisely calculated, unit orthogonal vector. It’s like having a built-in level, but for the abstract world of mathematics. And trust me, it’s a lot more reliable than my friend's "gravity will guide us" approach to mirror hanging. My mirror is still a bit wonky, by the way. Maybe I need to go back and re-calculate its placement using vectors. Or just buy a smaller mirror.